Stereoscopic (2D3C) PIV
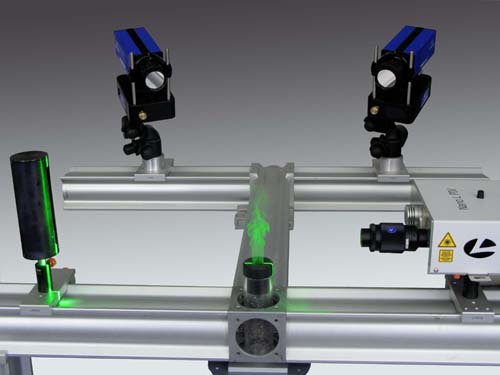
Stereo PIV is based on the principle of stereoscopic imaging: two cameras capture the image of the illuminated particles from different angles and is well known from the human eyesight.
For camera based imaging one has to take into account that a view at an angle also leads to an image at an angle. For a camera this means that only one small area is in focus. The solution is to tilt the whole camera so that the sensor is covered by the tilted focal plane. This 'Scheimpflug' condition is met by an adapter between camera and lens and the associated distorted image is corrected for by the imaging software.